
倾角传感器根据内部结构主要有三种不同的原理,固态,液态,气态倾角传感器,工用行业一般
倾角传感器的定义
用于测量载体相对于某个参考平面倾斜角度的传感器.
基本原理
理论基础就是牛顿第二定律,根据基本的物理原理,在一个系统内部,速度是无法测量的,但却可以测量其加速度。如果初速度已知,就可以通过积分计算出线速度,进而可以计算出直线位移。所以它其实是运用惯性原理的一种加速度传感器。
当倾角传感器静止时也就是侧面和垂直方向没有加速度作用,那么作用在它上面的只有重力加速度。重力垂直轴与加速度传感器灵敏轴之间的夹角就是倾斜角了。
随着MEMS技术的发展,惯性传感器件在过去的几年中成为最成功,应用最广泛的微机电系统器件之一,而微加速度计(microaccelerometer)就是惯性传感器件的杰出代表。作为最成熟的惯性传感器应用,现在的MEMS加速度计有非常高的集成度,即传感系统与接口线路集成在一个芯片上。
倾角传感器把MCU,MEMS加速度计,模数转换电路,通讯单元全都集成在一块非常小的电路板上面。可以直接输出角度等倾斜数据,让人们更方便的使用它。
其特点是:硅微机械传感器测量(MEMS)以水平面为参面的双轴倾角变化。输出角度以水准面为参考,基准面可被再次校准。数据方式输出,接口形式包括RS232、RS485和可定制等多种方式。抗外界电磁干扰能力强。
承受冲击振动10000G。
从工作原理上可分为“固体摆”式、“液体摆”式、“气体摆”三种倾角传感器
“固体摆”式惯性器件
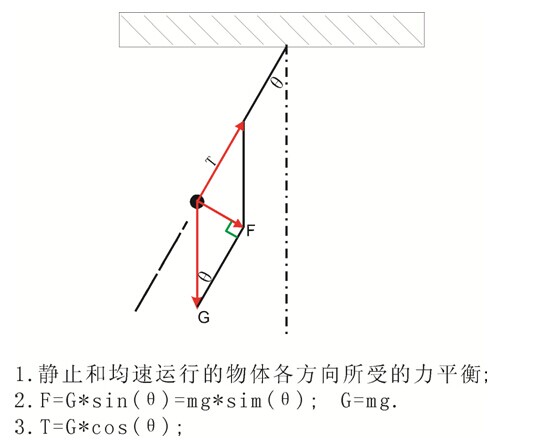
固体摆在设计中广泛采用力平衡式伺服系统,如图所示,其由摆锤、摆线、支架组成,摆锤受重力G和摆拉力T的作用,其合外力F为:
(1)其中,θ为摆线与垂直方向的夹角。在小角度范围内测量时,可以认为F与θ成线性关系。如应变式倾角传感器就基于此原理。
“液体摆”式惯性器件
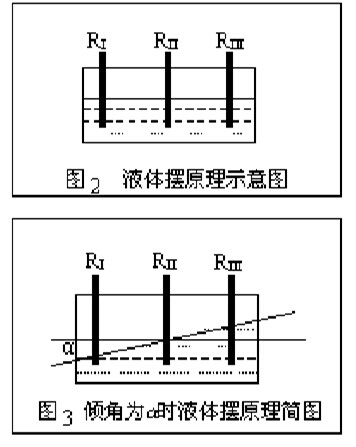
液体摆的结构原理是在玻璃壳体内装有导电液,并有三根铂电极和外部相连接,三根倾角传感器
电极相互平行且间距相等,如图2所示。当壳体水平时,电极插入导电液的深度相同。如果在两根电极之间加上幅值相等的交流电压时,电极之间会形成离子电流,两根电极之间的液体相当于两个电阻RI和RIII。若液体摆水平时,则RI=RIII。当玻璃壳体倾斜时,电极间的导电液不相等,三根电极浸入液体的深度也发生变化,但中间电极浸入深度基本保持不变。如图3所示,左边电极浸入深度小,则导电液减少,导电的离子数减少,电阻RI增大,相对极则导电液增加,导电的离子数增加,而使电阻RIII减少,即RI>RIII。反之,若倾斜方向相反,则RI<RIII。在液体摆的应用中也有根据液体位置变化引起应变片的变化,从而引起输出电信号变化而感知倾角的变化。在实用中除此类型外,还有在电解质溶液中留下一气泡,当装置倾斜时气泡会运动使电容发生变化而感应出倾角的“液体摆”。
气体摆”式惯性器件
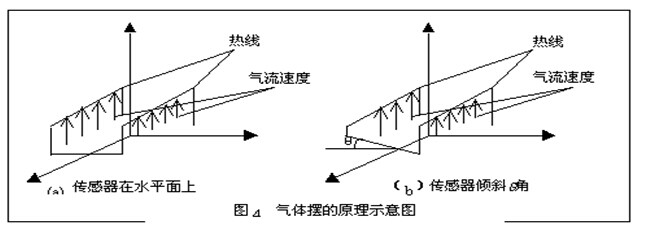
气体在受热时受到浮升力的作用,如同固体摆和液体摆也具有的敏感质量一样,热气流总是力图保持在铅垂方向上,因此也具有摆的特性。“气体摆”式惯性元件由密闭腔体、气体和热线组成。当腔体所在平面相对水平面倾斜或腔体受到加速度的作用时,热线的阻值发生变化,并且热线阻值的变化是角度q或加速度的函数,因而也具有摆的效应。其中热线阻值的变化是气体与热线之间的能量交换引起的。
“气体摆”式惯性器件的敏感机理基于密闭腔体中的能量传递,在密闭腔体中有气体和热线,热线是唯一的热源。当装置通电时,对气体加热。在热线能量交换中对流是主要形式。
对流传热的方程为:(2)
其中:h—热量传递系数(w/m2×k),s—热线表面积(m2),TH—热线温度(K),TA—气体温度(K)。
热量传递系数h与流体的热传导率、动力学粘度、流体速度和热线直径有关,表示为:(3)
其中:Nu为—努塞尔(Nusselt)数,l—热传导率(W/mK),Re—雷诺(Reynold)数,U—流体速度(m2/s),D—热线的直径(m),n—流体的动力学粘度。
当气流以速度U垂直穿过热线时,(4)
将(4)式代入(3)式得:(5)
根据热平衡方程可得:
所以:(6)
假设和s为常数,则有:(7)
从式(7)可以看出,当流体的动力学粘度、密度和热传导特性一定时,若热线周围流体的速度不同,则流过热线的电流也不同,从而引起热线两端的电压也产生相应的变化。气体摆式惯性器件就是根据一原理研制的。
气体摆式检测器件的核心敏感元件为热线。电流流过热线,热线产生热量,使热线保持一定的温度。热线的温度高于它周围气体的温度,动能增加,所以气体向上流动。在平衡状态时,如图4(a)所示,热线处于同一水平面上,上升气流穿过它们的速度相同,即V1=V1′,这时,气流对热线的影响相同,由式(7)可知,流过热线的电流也相同,电桥平衡。当密闭腔体倾斜时,热线相对水平面的高度发生了变化,如图4所示,因为密闭腔体中气体的流动是连续的,所以热气流在向上运动的过程中,依次经过下部和上部的热线。若忽略气体上升过程中克服重力的能量损失,则穿过上部热线的气流已经与下部热线的产生热交换,使穿过两根热线时的气流速度不同,这时V2¢>V2,因此流过两根热线的电流也会发生相应的变化,所以电桥失去平衡,输出一个电信号。倾斜角度不同,输出的电信号也不同。
固、液、气体摆性能比较
就基于固体摆、液体摆及气体摆原理研制的倾角传感器而言,它们各有所长。在重力场中,固体摆的敏感质量是摆锤质量,液体摆的敏感质量是电解液,而气体摆的敏感质量是气体。
气体是密封腔体内的唯一运动体,它的质量较小,在大冲击或高过载时产生的惯性力也很小,所以具有较强的抗振动或冲击能力。但气体运动控制较为复杂,影响其运动的因素较多,其精度无法达到军用武器系统的要求。
固体摆倾角传感器有明确的摆长和摆心,其机理基本上与加速度传感器相同。在实用中产品类型较多如电磁摆式,其产品测量范围、精度及抗过载能力较高,在武器系统中应用也较为广泛。
液体摆倾角传感器介于两者之间,但系统稳定,在高精度系统中,应用较为广泛,且国内外产品多为此类。
和所有加速度计一样,传感器单元是差动电容器,其输出与加速度成比例。加速度计的性能依赖于传感器的结构设计。差动电容是由悬臂梁构成,而悬臂梁是由很多相间分布的指状电容电极副构成,一副指状电容电极可简化为图1所示的结构:
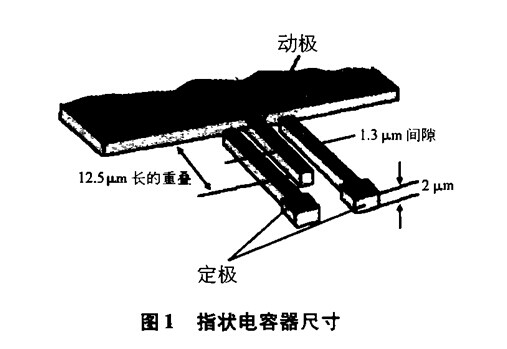
每个指状电极的电容正比例于固定电极和移动电极之间的重叠面积以及移动电极的位移。显然,这些都是很小的电容器,并且,为了降低噪声和提高分辨力,实际上需要尽可能大的差动电容。
悬臂梁的运动是由支撑它的多晶硅弹簧控制。这些弹簧和悬臂梁的质量遵守牛顿第二定律:质量为m的物体,因受力F而产生加速度a,则F=ma。而弹簧的形变与所受力的大小成比例,即F= kx,所以
X=(m/k)a
式中 x为位移,单位:m;m为质量,单位:kg;a为加速度,单位:m/s ;k为弹簧刚度系数,单位:N/m。
因此,仅有支撑弹簧的刚度和悬臂梁的质量2个参数是可控的。减小弹簧系数似乎是提高悬臂梁灵敏度的一种容易方法,但悬臂梁的共振频率正比例于弹簧系数,所以,减小弹簧系数导致悬臂梁共振频率降低,而加速度计必须工作在共振频率之下。此外,增大弹簧系数使悬臂粱更坚固。所以,如果保持尽可能高的弹簧系数,只有悬臂梁的质量参数是可变化的。通常,增大质量意味着增大传感器的面积,从而使悬臂梁增大。在ADXL202中,设计出一个新颖的悬臂梁结构。构成X轴和y轴可变电容的指状电极沿着一个正方形四周的悬臂梁集成,从而使整个传感器的面积减小,而且,共用的大质量的悬臂梁提高分辨力。位于悬臂梁四角的弹簧悬挂系统用以使X轴和y轴的灵敏度耦合减小到最小。
每个指状电极的电容正比例于固定电极和移动电极之间的重叠面积以及移动电极的位移。显然,这些都是很小的电容器,并且,为了降低噪声和提高分辨力,实际上需要尽可能大的差动电容。
悬臂梁的运动是由支撑它的多晶硅弹簧控制。这些弹簧和悬臂梁的质量遵守牛顿第二定律:质量为m的物体,因受力F而产生加速度a,则F=ma。而弹簧的形变与所受力的大小成比例,即F= kx,所以
X=(m/k)a
式中 x为位移,单位:m;m为质量,单位:kg;a为加速度,单位:m/s ;k为弹簧刚度系数,单位:N/m。
因此,仅有支撑弹簧的刚度和悬臂梁的质量2个参数是可控的。减小弹簧系数似乎是提高悬臂梁灵敏度的一种容易方法,但悬臂梁的共振频率正比例于弹簧系数,所以,减小弹簧系数导致悬臂梁共振频率降低,而加速度计必须工作在共振频率之下。此外,增大弹簧系数使悬臂粱更坚固。所以,如果保持尽可能高的弹簧系数,只有悬臂梁的质量参数是可变化的。通常,增大质量意味着增大传感器的面积,从而使悬臂梁增大。在ADXL202中,设计出一个新颖的悬臂梁结构。构成X轴和y轴可变电容的指状电极沿着一个正方形四周的悬臂梁集成,从而使整个传感器的面积减小,而且,共用的大质量的悬臂梁提高分辨力。位于悬臂梁四角的弹簧悬挂系统用以使X轴和y轴的灵敏度耦合减小到最小。
典型应用场合
角度测量,水平调整,零位调整倾角开关(十二路开关信号),
安全控制,监控,报警机械臂,大坝,建筑,桥梁角度测量
对准控制,弯曲控制。初始位置控制,倾角姿态记录仪汽车四轮定位
倾角传感器应用特点
可以调节输出频率,内置零位调整,可以根据要求定制零位调整按钮,从而实现在一定的角度置零的功能。这对于要测量相对倾角的场合非常有用。使用完毕后可以重新回归零位。倾角传感器在这种场合使用,只要将传感器固定在一定的平面,测量前使用零位按钮实现清零功能,传感器在此之后读出来的数据就是相对于该平面的相对倾角。
滤波功能:
当要求输出比较稳定时,建议使用比较平缓的输出,以使输出的值趋向平和,而变化不至于太剧烈。如果要求非常及时的输出,比如在测量有较高频率的振动的场合,可以使用高频输出,不过,输出会因为响应时间非常短而不稳定。同时,可以使用内部滤波功能,以实现在振动场合测量倾角的目标。
全量程倾角测量:
通过双轴的配合,可以实现360度倾角的测量。目前产品已经非常稳定。在一些需要进行全量程倾角测量的场合,选择360度产品是比较理想的。